










3.80m智能无人巡护船
采用高海况、高速单体船型,采用铝合金材质制造,船艇强度好,耐腐蚀,稳定性好。
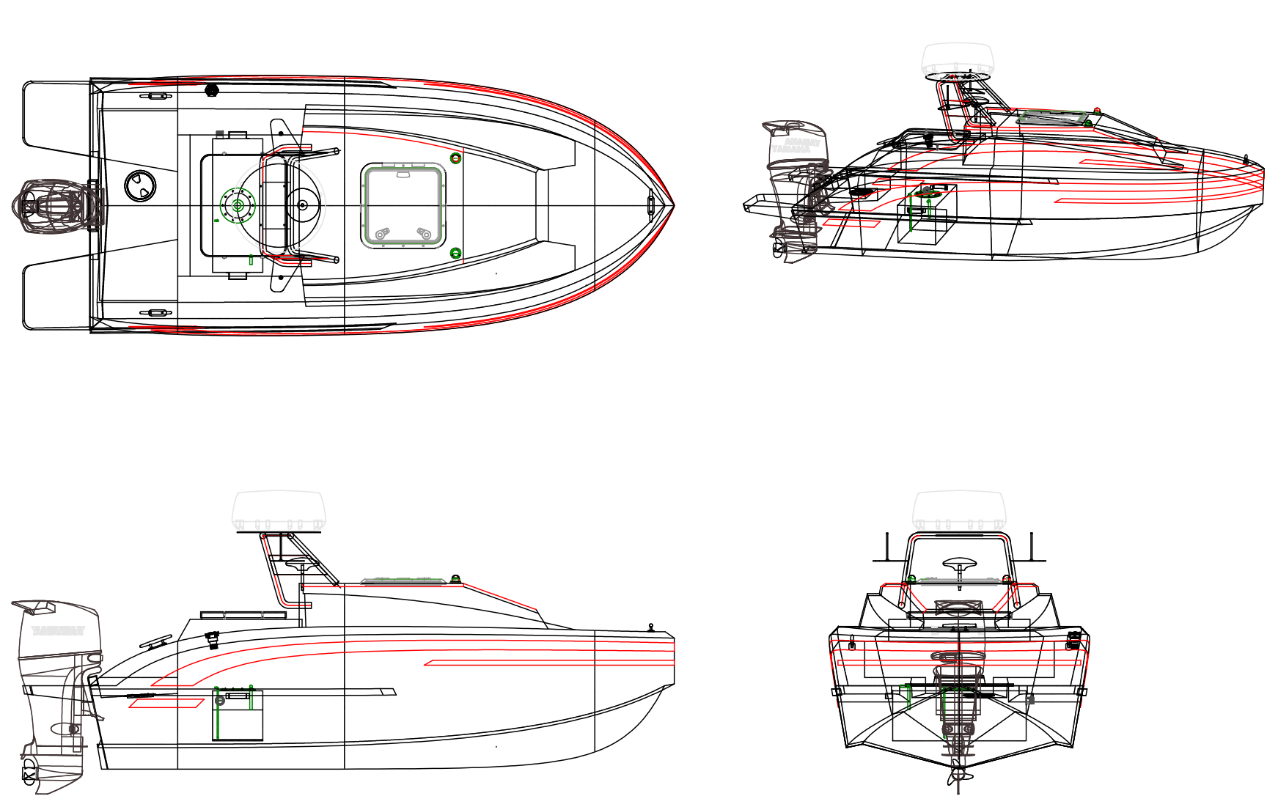
技术参数
|
总长Loa |
3.80m |
|
艇长LH |
3.50m |
|
艇宽B |
1.60m |
|
型深D |
0.855m |
|
动力P |
1*30HP |
|
最大速度V |
40km/h(22kn) |
|
巡航速度v |
18km/h(10kn) |
|
航区 |
遮蔽航区 |
|
续航时间T |
≥4h(≥160km) |
本船适航于我国4类航区海域使用,为可航行于距岸不超过 10n mile。3级海况情况下正常工作,4级海况可以生存。
舾装系统
该艇甲板舱盖共3个,挂机槽配置1个圆形检修口,尾部甲板1个机舱盖,1个无人控制舱舱盖。
搭载进气机舱透气百叶窗。
配置3个6寸羊角,首部1个拖环,尾封板配置2个固定环。
尾部侧面水线位置设置防撞护舷。
搭载双色舷灯。
动力系统
该艇采用YAMAHA汽油外挂机,螺旋桨推进器,功率30HP,排气量496cc,2缸机,净重55kg,尾板高度550mm,转速4500~5500rpm,油耗11.5L/h,油箱采用定制不锈钢油箱50L,每小时油耗11.5L/h,可以全速状态下航行4.5h,可以航行160km。
航行控制系统
·具备将融合卫星地图、雷达、视觉、AIS等感知设备信息上传至岸基显控台,实现任务航线规划功能;
·具备有人驾驶、远程操控、自主航行三种控制模式,具有高速跑圆和高速直线自主航行功能;
·具有指定区域自主巡逻监控、可疑目标抵近侦察取证功能;
·具有自主避障功能(对单一障碍物目标的高速避障和自主航行、对多种静、动态障碍物目标的高速避障和自主航 行,规避动/静态目标数量≥5);
·具有控制光电监视设备对周围海域进行监视的功能;
·实现航速、航向、航迹控制,稳态下偏离航线距离不超过1m;
·能接收并执行手持遥控器的遥控指令,接收、保存并执行岸基控制站的航行任务指令;
·具有任务载荷设备接入与数据采集功能;
·具有图像信息、视频信息、数据信息存储及传输功能;
·具备通信链路断开时自主航行或自主返航的能力;
·具备失效保护控制电路,保证无人船出现故障时,能够迅速将无人船设置为停止航行状态;
·在紧急情况下具备在岸基控制站端一键断电和关机的能力。
组合导航系统
1.航向精度:0.1°(1σ,GNSS/BD信号良好,基线长度≥2m);
2.航速精度:0.03m/s(RTK);
3.姿态精度:1°(1σ,GNSS/BD信号良好);
4.位置精度:平面1.5m,高程3.0m(单点定位);平面1.5m,高程 3.0m(双频定位);平面0.4m,高程0.8m(DGNSS);平面10mm +1ppm,高程15mm +1ppm(RTK);
5.数据更新速率:1Hz/5Hz/10Hz/100Hz(可调)。
环境感知系统
导航雷达
1) 最大探测距离:20km;
2) 最小作用距离:50m;
3) 探测分辨能力,1000m时距离分辨力30m,角度分辨力4.5°。
AIS
- AIS发射通道1个,AIS接收通道2个(含A、B信道);
- 比特率:默认38400波特率,最大支持115200波特率,可编程;
- 接收灵敏度:<-107dBm@误码率<20%;
- 具备国家规定的AIS中文短信收发通道。
通信系统
- 具备遥控器数传通信的能力,支持无人船与遥控器间通信距离不低于0.3km;
- 具备宽带专网通信的能力,支持无人船与岸基控制站通信距离不低于15km,支持无人船与地面控制站之间的视频、图像、数据等大信息量的实时传输;
- 支持最大下行速率达100Mbps,最大上行速度达50Mbps;
-
具备2个10/100Mbps以太网接口,1个串行接口。
任务载荷
光电云台
- 最高分辨率:200万像素;
- 调整角度:水平:0°~355°,垂直:-20°~90°;
- 支持20倍光学变焦,最大探测距离400m;
- 防护等级:IP65。
水质监测
- 温度:测量范围-5~50℃,准确度±0.05℃;
- 电导率:测量范围0~200mS/cm,准确度±1%;
- 溶解氧:测量范围0~50mg/L,准确度±5%;
- pH:测量范围0~14,准确度±0.2;
- ORP:测量范围-999~999mV,准确度±20mV;
- 浊度:测量范围0~4000FNU,准确度0.3FNU(0~999FNU),±5%(1000~4000FNU);
- 叶绿素:测量范围0~400μg/L;检出限0.09μg/L。
水质取样
- 可实现1~10点采集水样,各采样点、采样量可设置;
- 最大单点采样容量:1L;
- 采样深度:0.3~0.5m;
- 采样速度:2L/min;
- 可实现人工遥控采样,自动航行设置采样点采样;
- 自动生成采样数据报表,包含采样时间、采样位置和采样水量。
远程控制基站
遥控器
功能:
- 可视距遥控无人船行驶;
- 可中断或改变无人船工作任务;
- 遇突发情况,可紧急停船;
- 与岸基控制站对无人船控制权可交互转换。
硬件参数:
- 遥控器屏幕尺寸5寸;
- 电池续航时间6h;
- 重量1.5kg;
- 内置无线通信模块,射频功率23dB。
硬件参数
- 遥控器屏幕尺寸5寸;
- 电池续航时间6h;
- 重量1.5kg;
- 内置无线通信模块,射频功率23dB
岸基控制站

功能:
- 实现与关联无人艇建立有效视频/语音/数据通信的能力,且冗余设置,并具有足够带宽;
- 实现无人船推进和操纵系统远程控制与状态显示,具有遥控无人船航行功能;
- 获取船舶场景感知信息并予以在岸基控制站上显示,包括显示船舶控制状态、航路信息、船舶周围场景信息、船舶系统状态信息等内容;
- 控制站端具备在特定条件下操控多无人船协同工作的能力,需详细描述实现过程;
- 支持下载工作水域卫星地图、并进行存储和管理;
- 可向船载航行控制系统下达航行控制和设备控制指令,进行任务规划,设置系统运行参数,调节系统控制变量,显示人机交互界面;
- 可显示无人船的摄像头所拍摄的高清视频图像;
- 完备的航线任务设计,支持各种形式的航线编辑、自动航线规划,并可对航线任务进行监控,支持任务可以保存、修改、管理、载入。
硬件参数:
多功能立式操控座舱,固定安装在岸基、母船等场景,高性能监控主机搭载无人船远程监控系统软件,符合人体工学设计,人性化界面操作,便于人员进行更加专业和功能完善的无人船航行操控、任务规划和数据监视。
工控主机
1)CPU:i7系列处理器;
2)内 存:16G DDR3;
3)硬 盘:System 256G SSD;
4)显 卡:独立显卡2G;
5)操作系统:支持WIN7 (64位)或Windows系统以及Linux操作系统;
6)外部接口:2路网口,4路串口,4路USB口;
7)存储温度:-40℃~+70℃。
主显示器(3套)
1)尺 寸:23寸;
2)分辨率:1920×1080。
控制面板
具有油门踏板1个,舵控方向盘1个,一体化键鼠1个,开关旋钮及指示灯面板各1件。
|
序号 |
名称 |
单位 |
数量 |
备注 |
|
1 |
船体平台 |
艘 |
2 |
含船壳、动力、推进、供电等。 |
|
2 |
航行控制系统 |
套 |
2 |
含控制器、软件等。 |
|
3 |
通信系统 |
套 |
3 |
包含宽带、窄带通信模块等 |
|
4 |
组合导航系统 |
套 |
2 |
含软件 |
|
5 |
导航雷达 |
套 |
2 |
含软件 |
|
6 |
光电云台 |
套 |
2 |
含软件 |
|
7 |
AIS |
套 |
2 |
|
|
8 |
遥控器 |
套 |
2 |
|
|
9 |
岸基控制站 |
套 |
1 |
含软件 |
|
10 |
专用艇架 |
套 |
2 |
|
|
11 |
备品备件 |
套 |
1 |
|